







Около 200 лет назад Фарадей изготовил работающий прототип электродвигателя, абсолютно непрактичный (стержень, окунутый в блюдечко с ртутью и вращающийся по кругу, если подать ток), но чуть ли не впервые было показано, как превратить электрический ток в непрерывное механическое движение.
В 1889 году Михаил Доливо-Добровольский показал трёхфазный асинхронный двигатель, подозрительно похожий на теперешние: ротор "беличье колесо", распределённые обмотки статора и даже схемотехническое обозначение то же самое, звёзды-треугольники, всё уже было тогда! Кажется, что за такой срок электродвигатели были изучены вдоль и поперёк, и осталось лишь неторопливое эволюционное улучшение, битва за единицы-десятки процентов, не более того.
Тем не менее, с "возвращением" электромобилей в 21 веке чуть ли не главной "рекламной фишкой" стали новейшие двигатели с рекордными показателями, в десятки раз большей мощности на килограмм веса, чем раньше. Аккумуляторы особо не прорекламируешь, когда они занимают львиную долю веса и всё равно не могут похвастаться тем запасом хода, что даёт 50 литров бензина, а вот мощнейший движок размером с кулак - "это же круто", можно показывать публике двигатель внутреннего сгорания и рядышком электромотор и приговаривать: до чего дошёл прогресс! А у авиамоделистов появились двигатели - "аутраннеры" на неодимовых магнитах, развивающие мощность в сотни ватт при массе меньше сотни грамм.
Неужели изменились законы физики? Или в течении сотни лет конструкторы что-то проглядели, и только сейчас вдруг нашёлся новый подход, позволивший получить такие компактные движки? Нефтяное лобби проникло в каждое конструкторское бюро и не позволяло делать компактные электродвигатели, пока не пришла Гретта и всех не спасла заклинанием How Dare You? Если кратко, кое-какие подвижки безусловно есть (те самые единицы-десятки процентов), а изменилось в первую очередь ТЕХНИЧЕСКОЕ ЗАДАНИЕ, причём в случае с электромобилями во многом произошёл "подгон под ответ"...
Базовые законы
Существует множество разных типов электродвигателей, и у каждого свои подтипы. Скажем, есть двигатели постоянного тока: с постоянными магнитами либо с обмотками возбуждения. Вторые выполнялись параллельного, последовательного, смешанного и независимого возбуждения. Сейчас ещё появились BLDC, BrushLess DC, т.е бесколлекторные двигатели постоянного тока, там вместо коллектора (коммутатора) с щётками стоят полевые транзисторы (не в самом моторе, обычно отдельным блоком, ESC и иже с ними), а статор и ротор поменялись местами.
Второй огромный класс - это двигатели переменного тока, основные представители:
- коллекторные, они же "универсальные" (могут работать как на постоянном, так и на переменном токе) - именно их по-прежнему можно встретить в пылесосах и электроинструментах, работающих от розетки,
- асинхронные, "рабочая лошадка" промышленности и ЖКХ, а с появлением тяговых инверторов пошли и в транспорт. Бывают с короткозамкнутым ротором "беличье колесо" (самые простые, надёжные и распространённые) либо с фазным ротором (его тоже изобрёл Доливо-Добровольский),
- синхронные. Либо очень высокой мощности (сотни кВт), либо наоборот, миниатюрные, например, сливной насос в стиральной машинке, или двигатель поддона микроволновой печи.
Можно разделять и дальше, разных типов тьма тьмущая, каждый со своей спецификой, и появляются новые, какой-нибудь IPM-SynRM. Если попытаться описать работу каждого из них, его достоинства и недостатки, этого и на семестр хватит, а то и на несколько. Но к счастью, с точки зрения преобразования электрической мощности в механическую, работа любого из них сводится буквально к двум законам, и самые базовые ограничения можно найти непосредственно из них.
Сила Ампера
На проводник длиной L, помещённый поперёк магнитного поля напряжённостью (индукцией) B, и через который протекает ток I, будет действовать сила:
F = BIL
Крутящий момент практически любого электродвигателя можно свести к силе Ампера. В двигателе постоянного тока эти проводники с током непосредственно размещены на якоре, и мы подаём на них ток правильной полярности, чтобы обеспечить вращение. В асинхронном двигателе этот ток возникает в проводниках "беличьей клетки" в результате вращающегося магнитного поля, которое пытается "пролезть" сквозь эту клетку. Наверное, сложнее всего свести к силе Ампера работу синхронного реактивного двигателя (Switched Reluctance Motor), интересная штуковина, но в чистом виде рекордных характеристик она не даёт, обсудим как-нибудь в другой раз.
И по этой же простейшей формуле можно сообразить, как увеличить тягу, развиваемую мотором. В первую очередь, хочется максимально поднять напряжённость магнитного поля, B. Увы, здесь предел вполне очерчен: насыщение железного сердечника примерно на 2 Тл. Электротехнические стали безусловно улучшались с течением времени, но уже довольно давно прогресс в этой области застопорился. Без сердечника получить мощное поле тем более трудно, не поможет ни неодимовый магнит, ни обмотки возбуждения. Да и с сердечником достичь 2 Тл сложно, отчасти из-за выходящей "на полочку" характеристики намагничивания (что требует подавать огромные токи для генерации магнитного поля), отчасти из-за геометрии статора и ротора, отдельные части магнитопровода успевают насытиться быстрее других. Да и потери на перемагничивание растут быстро, поэтому такой "рекордный" двигатель будет иметь малый к.п.д. Но в целом, 1,5..1,8 Тл вполне достигается в современных двигателях, и здесь ожидать каких-то "чудес" от новых двигателей не приходится.
Следующая буква: ток I. Повысим ток - повысится крутящий момент, только бы обмотки не сжечь... Если в электротехнических сталях за 130 лет шёл прогресс, то с материалом обмоток вообще ничего поменялось: это должна быть медь! Что удивительно, в справочнике по электротехнике за 1908 год [карманная книжка для установщиковъ электрическаго освѣщенiя] приводится сопротивление медного провода: 0,0175 Ом·мм2/м, СТОЛЬКО ЖЕ, сколько у нынешней меди марки М1, самой распространённой в электротехнике. Да, сейчас есть медь М00, у которой сопротивление на 1% меньше. Лучшую электропроводность имеет разве что серебро (аж на 7% лучше меди!), но из серебра делать обмотки пока что додумались лишь аудиофилы (бескислородную медь, ту самую М00, они тоже любят, звучит красиво. В смысле, фраза звучит красиво, аппаратура с таким кабелем звучит так же :)), и ещё в высокочастотной технике, где из-за скин-эффекта ток течёт только по поверхности, и тончайшее напыление серебром может заметно повысить характеристики и стоить не очень дорого.
Ток в обмотках можно повышать до тех пор, пока из-за нагрева проводника (I2R) не будет превышена допустимая температура изоляции. Сама медь не шибко боится перегрева, как и электротехническая сталь вокруг, а вот изоляцию нужно беречь. Большинство отказов двигателей и происходят из-за нарушения изоляции, приводящей к короткозамкнутым виткам, а дальше пошло-поехало... Именно поэтому такое внимание уделяют классу нагревостойкости изоляции: чем он выше, тем больший ток можно подать на ту же самую обмотку, а значит, тяга двигателя повысится. Когда-то повсеместно использовался класс B (130 °C), сейчас - классы F (155 °C) и H (180 °C). В изоляционных материалах достигнут чуть ли не самый большой прогресс, но и здесь пока что "упёрлись".
Говорить о конкретных амперах здесь бессмысленно: амперы легко "обмениваются" на вольты изменением количества витков. Скажем, был один толстый виток с сечением S, длиной L и общим сопротивлением R. Мы подавали на него ток I, получали силу Ампера BIL и омические потери I2R. Затем мы заменили его на два витка с сечением S/2 (влезающие в тот же самый паз), длина каждого по-прежнему L. Сопротивление одного витка 2R, но мы соединили их последовательно и получили общее сопротивление 4R. Подали ток I/2, но поскольку витка два, то сила Ампера не изменилась, те же BIL (ток прошёл сначала по одному витку, потом по другому, надо либо ток "дважды" сосчитать, либо длину), а омические потери: (I/2)24R = I2R, то же самое. Мы просто увеличили напряжение вдвое, а ток вдвое уменьшили. Поэтому лучше говорить о плотности тока в обмотке, j (амперы на кв. мм), вот её так "не обманешь"!
Максимально допустимая плотность тока не является "фундаментальной физической константой", но всё же в двигателях, отличающихся по мощности и габаритам на много порядков (от ватт до единиц-десятков мегаватт, как минимум), плотность тока удивительно похожа и находится в диапазоне 3..10 А/мм2. Она зависит от того, насколько хорошо мы устроим отвод тепла. Наиболее простой способ, чаще всего применяющийся - воздушное охлаждение. Перейдя на жидкостное охлаждение, можно действительно увеличить крутящий момент, хоть и ценой снижения К.П.Д: потери на нагрев меди растут как квадрат тока, а развиваемая сила - лишь линейно. По этой же причине не стоит ожидать какого-то существенного (в разы, а то и на порядки) повышения тяги за счёт лучшего теплоотвода. Скажем, получив возможность отводить вдвое больше тепла, мы можем поднять ток на 41%, тем самым на 41% увеличив крутящий момент. Такие порядки величин стоит ожидать в моторах электромобилей, где "по автомобильной привычке" делают жидкостное охлаждение.

Просто с торца двигателя забирать воздух оказывалось не очень хорошо: "замучаешься пыль глотать", иногда видно, какие снежные бураны электричка поднимает! А если брать чуть повыше - то уже нормально.
Вообще, если взглянуть на системы охлаждения электродвигателей, они не кажутся какими-то "предельными", там нету радиаторов, собранных из сотен пластин с шагом в пару миллиметров, нету тепловых трубок, всё довольно-таки прозаично. Причиной тому - экономическая невыгодность таких систем. Поскольку тяга растёт линейно с током, а потери - квадратично, то если пришлось такими интенсивными методами тепло отводить, значит, к.п.д уже ниже плинтуса. Это невыгодно в стационарных установках, невыгодно на железной дороге, невыгодно даже в электромобилях при нормальных поездках (по городу, на дачу и т.д., НЕ НА ГОНОЧНОЙ ТРАССЕ, и НЕ ДЛЯ ПОНТОВ): условно говоря, сэкономим 10 килограмм в двигателе, а потом придётся добавить 20 кг аккумуляторов, чтобы сохранить тот же запас хода. Чем пускать "цветмет" в охлаждение - лучше использовать в самом движке, чем больше активных материалов при той же мощности - тем он эффективнее.
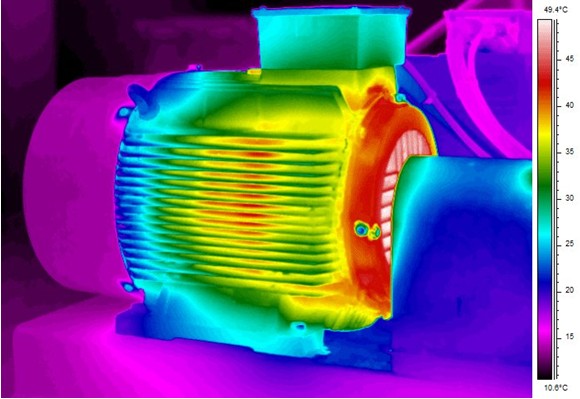
Из экономических соображений выбирается "щадящий" режим для двигателей общего назначения: малая плотность тока, малая индукция. Охлаждение "против всех правил": воздух не желает проходить "от начала до конца" по рёбрам - "вываливается наружу" раньше времени. Рёбер очень мало, и зачастую они выполнены из чугуна! Но такого охлаждения вполне хватает (в двигателях малых габаритов даже используют изоляцию класса нагревостойкости B), зато рёбра легко отливаются хоть в чугуне, хоть в люмини в составе станины двигателя, и легко вытираются тряпочкой, ведь они не закрыты сплошным кожухом ради правильного потока воздуха. А сделали бы всё "по науке" - ещё и пришлось бы специальных людей нанимать, которые регулярно кожуха разбирают и начинают вычищать пыль, свалявшуюся до состояния войлока! Или могучие воздушные фильтры и соответствующего напора крыльчатку, чтобы через эти фильтры воздух шёл сколько-нибудь шустро. Ещё и менять их по регламенту, раз в месяц...
Единственная причина, почему может захотеться поставить жидкостное охлаждение в электромобиле - чтобы суметь получить огромную КРАТКОВРЕМЕННУЮ ТЯГУ, аккурат продемонстрировать разгон "от нуля до сотни", после чего спокойно охлаждаться. И "выцарапать" дополнительный процент в КПД при нормальной поездке, если лобовое сопротивление радиатора и затраты на прокачку антифриза этот процент не съедят...
Рекордные показатели плотности тока достигаются в квадрокоптерных и авиамодельных моторчиках - там ПО ОПРЕДЕЛЕНИЮ идёт очень интенсивный обдув воздухом, поэтому так сделать можно. Горе тому, кто попытается эти моторчики применить "не по назначению", восхитившись их маленькими размерами. Без такого обдува они могут сгореть даже на холостом ходу. Вот товарищ попытался их поставить на велосипед, вышло как-то не очень:
Расплатой за компактность становится низкий КПД, который оправдан только при сильных ограничениях по весу. Если таких ограничений нет - подобные моторы бессмысленны.
В общем, плотность тока также существенно поднять нельзя.
И остаётся лишь длина проводника, L. Если заменить ток I на jS, т.е допустимую плотность тока, умноженную на сечение проводника, получим:
F = BjVмеди,
где B - допустимая напряжённость магнитного поля (индукция), Тл,
j - допустимая плотность тока, А/м2,
Vмеди - объём всех обмоток, величина, определяющая габариты всего двигателя.
Вокруг обмоток обязан идти сердечник, чтобы усилить магнитное поле и правильно его направить. Тут множество различных конфигураций пазов и обмоток, явнополюсные машины и неявнополюсные, а сейчас ещё и аксиальные вовсю пробуют вместо привычных радиальных, но физику не обманешь. Возможны оптимизации между медью и сталью: медь очень тяжёлая и дорогая, сталь полегче и подешевле. Поэтому можно проектировать двигатели с минимальным объёмом, но тяжеленные (значит, много меди впихнули), можно с минимальной массой, а можно с минимальной стоимостью, или, как это делалось при разработке унифицированных серий двигателей общего назначения, оптимизировалась некая взвешенная сумма различных параметров, типа, "хотелось бы удешевить, но не сильно в ущерб характеристикам. Хотелось бы объём поменьше, если только это не слишком дорого, и т.д". Так что для гиперкаров, где цена не аргумент (наоборот, чем дороже - тем круче, ведь автомобиль за 2 000 000$ обязательно вызовет больше восторга, чем автомобиль за 1 000 000$), можно здесь немножко отыграть, положить побольше меди, чем обычно.
В целом, "по больнице" (в двигателях классического исполнения), медь занимает примерно 1/10 массы двигателя, или 1/20 объёма.
Получается, что сколько ни играйся с типом двигателя, количеством полюсов, методом намотки (включая пресловутую "Славянку"), числом витков обмоток, но какую силу суммарно разовьют его обмотки - вполне понятно. Максимально подняв электрическую нагрузку (плотность тока) и магнитную нагрузку, можно добиться высокой тяговооружённости, но об улучшении на порядок здесь речь не идёт, в лучшем случае об улучшении в 2-3 раза ценой удорожания, усложнения, снижения КПД. Тяга в электродвигателях даётся нелегко...
Блинчики против колбасок
Сила в ньютонах, развиваемая обмотками, нас не интересует сама по себе, интересует крутящий момент на валу. Если по ньютонам мы практически "упёрлись" в объём двигателя, хочешь-не хочешь, надо его наращивать, то по ньютон-метрам можно ещё повоевать. Нужно отнести обмотки как можно дальше от оси, тогда та же самая сила даст бОльший крутящий момент! То есть, выбирая между "колбаской" (длинным и узким двигателем), и "блинчиком" (коротким и широким), надо бы предпочесть "блинчик". Физику мы здесь не обманываем: расплатой за высокий крутящий момент становится высокая линейная скорость обмоток при тех же оборотах в минуту, а значит и большой противо-ЭДС, поэтому и напряжение источника питания нужно будет повысить, чтобы они уравновесились. Но вся прелесть в том, что высокая линейная скорость в электрическом плане почти "бесплатна". Разве что быстрое перемагничивание сердечника и вихревые токи приведут к повышенному нагреву, но это терпимо.
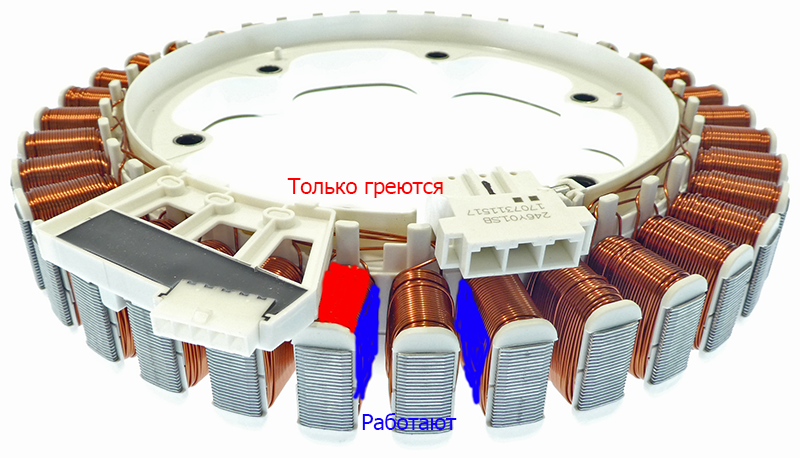
По той же причине можно предпочесть "аутраннер", двигатель, в котором ротор расположен ВОКРУГ статора (как в видеоролике выше). Так удаётся отнести действующие силы как можно дальше от оси и поднять крутящий момент. Другой вариант - аксиальный мотор, здесь обмотки простираются до самого края двигателя, тогда как в "аутраннере" снаружи всё равно должен располагаться магнит.
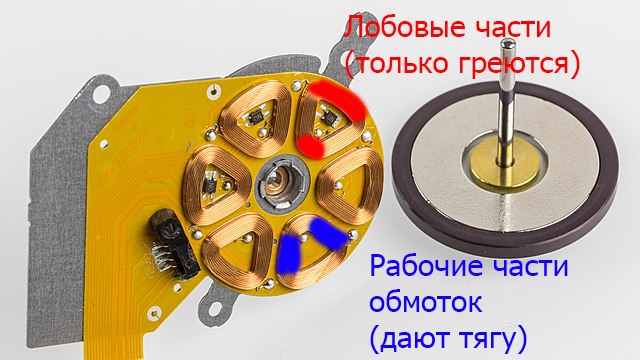
Есть ли у таких конфигураций недостатки? Безусловно! Медь расходуется неэффективно: чуть ли не половина всей меди приходится на лобовые части обмоток, которые не развивают крутящего момента, только греются впустую! Чтобы получить приемлемый КПД, приходится наращивать количество меди ещё сильнее.
Далеко не всегда такие двигатели хорошо вписываются в габариты. В электродрель такой не запихнёшь - стоящий у сверла "блинчик" не позволит разглядеть, а что мы сверлим? Не всунется он и в болгарку (УШМ), тогда как "колбаска" как раз очень кстати - всё равно длина нужна, чтобы надёжно удержать инструмент в двух руках! В тяговых двигателях электрички уж точно диаметр поднимать нельзя, начнёт зацепляться за элементы стрелочного перевода и пр. Такие двигатели требуют гораздо более точной сборки, более "прецизионных" подшипников и жёстких деталей: в двигателях-"колбасках" ротор очень надёжно подвешен между двух разнесённых точек, люфт или смещения на доли миллиметра в одном из концов ни на что не повлияет. А вот если диск перекосит, проблем не избежать. Так что в целом они дороже и более капризны. Тяговый двигатель электрички собрал с помощью "молотка и какой-то матери", запихал в роликовые подшипники твёрдую смазку "буксол" - и 1 млн. км он отъездит, потом капремонт (КР1) - и ещё 1 млн. км. Второй капремонт (КР2) - и ещё 1 млн. км.
Оптимизировав электродвигатель под большой крутящий момент, ценой более "капризной" конструкции и переизбытка меди, удаётся повысить крутящий момент ещё раза в 2, при том же объёме. В этом отчасти успех авиамодельных движков, велосипедных/самокатных, да и в электромобили раз за разом "примериваются", но хотя бы "Теслы" таким не страдают, там конструкция более традиционная. Впрочем, довольно странно считать "блинчики" новым, революционным техническим решением, достаточно взглянуть на генераторы в ГЭС.

Да, низкие обороты, это был единственный возможный вариант получить конструкцию разумных габаритов, не прибегая к редукторам. Суровый советский "прямой привод"! Обратная ситуация в мощных быстроходных (3000 об/мин) турбогенераторах: там не хочется повышать диаметр ротора, чтобы его не разнесло на части, поэтому приходится наращивать длину. Обычно и это считается нехорошим решением, т.к теперь уже длинный ротор начнёт прогибаться под собственным весом, и чтобы он этого не делал, ставят очень громоздкий жёсткий вал. Но иногда приходится идти на крайности!
Продолжительный и кратковременный режим двигателя
Мощность двигателя приводится для определённого режима. Самый базовый: режим S1, "продолжительный". Это значит, что двигатель можно эксплуатировать на данной мощности неограниченно долго - он не перегреется, выйдет на установившийся температурный режим, который для него "комфортен". Но проверять на режим S1 - то ещё "удовольствие", особенно, когда двигатель здоровенный, он на установившийся температурный режим полдня может выходить, а математик может сказать, что вообще НИКОГДА не выйдет!
Для транспорта принято указывать режим S2, кратковременный. Вместе с маркировкой S2, обязательно указывается и время. На ж/д используют ЧАСОВОЙ РЕЖИМ, т.е холодный двигатель запускают ровно на час, затем отключают. И по истечении часа температуры частей двигателя не должны превысить максимально допустимые. Мощность, которую двигатель может развивать в течение этого часа, называют ЧАСОВОЙ МОЩНОСТЬЮ. Она чуть выше мощности в непрерывном режиме, но совсем немного. К примеру, для электровозного двигателя НБ-514Б часовая мощность 820 кВт, а продолжительная: 765 кВт, и это при массе в 4,3 тонны. У более лёгкого двигателя электрички разрыв будет и того меньше, всё-таки даже 2-тонный агрегат, если на него подать 250 кВт, разогревается довольно быстро.
То есть, мощность нашего двигателя электрички вполне "честная", он её может развивать очень долго.
А что у "Теслы"? Для примера беру задний мотор из Tesla Model S, потому как на него хоть какие-то технические характеристики, а не только красивые маркетинговые слова и циферки.
Большинство информации взял с этого ролика:
Там указана мощность в Ludicrous mode 391 кВт, длительность не указана. На сайте, продающем отдельные компоненты "Теслы", нашёл также следующие цифры:
- 160 кВт в течение 12 минут,
- 45 кВт продолжительная мощность.
Исходя из этого, можно предположить, что 391 кВт мотор может развивать ровно столько, чтобы продемонстрировать рекордные характеристики разгона, это несколько секунд. Ничего экстраординарного в этом нет: самый обычный асинхронный двигатель "общего назначения" может кратковременно выдавать мощность в 2..3 раза выше номинальной, но на шильдике "хвастаться" этим не считают нужным, указывают номинальную (продолжительную) мощность, да и всё.
Далее, выходит, что 160 кВт - это мощность, которую удаётся поддерживать, но с огромной нагрузкой на систему охлаждения. Там стоит, условно, "автомобильный" радиатор, только вместо ДВС на 100 л.с (70 кВт) и КПД 30% (т.е в тепло уходит 50 кВт) он охлаждает асинхронный двигатель и инвертор к нему. И - о ужас, за 12 минут на полной дури оно всё доходит до ручки.
Возможность кратковременно выдать существенно больше своей продолжительной мощности свойственна любому электродвигателю! Но в большинстве "старых" применений она бесполезна. Если польза есть, то вместо продолжительного режима на шильдике напишут повторно-кратковременный, с длительностью работы и длительностью паузы, и за счёт возможности "отдохнуть" двигатель окажется помощнее. А если на какую-нибудь электродрель взглянуть, там будет указана вовсе не мощность на валу. Укажут максимально возможную мощность, потребляемую из розетки! Затем в инструкции напишут не перегружать и "давать отдохнуть", и понимайте как знаете...
В общем, если проводить честное сравнение двигателя электрички с двигателем "Теслы", нужно выбрать одинаковый режим - "продолжительный". Но всё же сделаем фору и сравним 160 кВт "Теслы" (считая, что вся проблема в системе охлаждения - поставить радиатор помощнее - и час выдержит, если только аккумуляторам не поплохеет раньше...) против 250 кВт в электричке (разница в 1,6 раза), но двигатель "теслы" весит 84 кг (информация из этого ролика Weber Auto, отдельно приведено для статора и ротора, я просуммировал), а у электрички: 2000 кг, т.е разница в 24 раза. По "удельным характеристикам" двигатель "теслы" пока лидирует в 15 раз, продолжим изыскания...
Закон Фарадея
Тоже знаком из школы: виток провода помещён в меняющийся магнитный поток Ф, из-за чего на нём возникает напряжение:
U = -dФ/dt
Работает во всех двигателях без исключения. И если сила Ампера увязывает между собой ток двигателя и развиваемую силу, то закон Фарадея увязывает линейную скорость ротора в районе обмотки и противо-ЭДС, возникающий на его клеммах.
Мощность двигателя равна UI, произведению тока на напряжение. И если ток через двигатель с заданными обмотками мы поднимать не можем (сгорит), то может напряжение поднять? Это будет соответствовать огромной скорости вращения. И да, с электромагнитной точки зрения здесь особенных ограничений нет. Простой и незамысловатый способ получить очень маленький, но мощный двигатель - задрать обороты до небес! Разумеется, этот способ применялся испокон веков: довольно редко встретишь "прямой привод", чаще всего электродвигатели включают через понижающий редуктор. Преимущество повышения оборотов одно: габариты двигателя существенно уменьшаются. Недостатков целое море: как правило, требуется более сложный и тяжёлый редуктор, уменьшается ресурс подшипников и всего двигателя в целом, такой двигатель вместе с редуктором зачастую более шумный, чем его тихоходный собрат. Меньше К.П.Д, как из-за механических потерь (подшипники, аэродинамические потери, потери в редукторе), так и электрических: сердечник часто перемагничивается, возникают потери на гистерезисе и вихревых токах.
Но если есть такая необходимость - на увеличение оборотов всегда идут. Весьма оборотистые движки можно встретить в болгарке (углошлифовальной машине), в пылесосе (под 2 кВт, а сам движок вполне умещается на ладони), в электродрелях, ведь если эти бытовые приборы будут излишне тяжёлыми и большими, ими будет неудобно пользоваться. Лучше смириться с низким к.п.д и высоким шумом. Да и работают они вовсе не 24 часа в сутки, так что и уменьшенный ресурс можно пережить, тем более, что есть много шансов поломок по другим причинам.
По мере роста мощности двигателей, наблюдается тенденция к уменьшению их оборотов. Как правило, габариты всё-таки растут "равномерно" - и длина ротора, и его диаметр. А с ростом диаметра возникает необходимость обороты снизить. Как минимум, с увеличением линейной скорости ротора возникает желание поставить побольше полюсов (иначе магнитная цепь растянется, потребуется очень много лишнего железа и длиннющие лобовые части обмоток), и если скорость станет слишком велика, возрастут потери на перемагничивание и на вихревые токи. Иногда это терпимо. Но дальше начинается ещё более жёсткое ограничение: роторы большого диаметра на слишком больших оборотах просто "разорвёт на части"! Здесь тип двигателя становится существенным фактором: асинхронные двигатели при том же диаметре ротора можно разогнать до бОльших скоростей, поскольку цельнолитая обмотка "беличье колесо", надёжно "замурованная" в отверстиях сердечника, выдержит больше, чем наборная обмотка коллекторного двигателя, закладываемая в ОТКРЫТЫЕ пазы, в которые потом вбивают "заглушки", и обматывают это безобразие стеклобандажной лентой. В моторчиках небольших размеров (в электродрели, болгарке и пр.) это не мешает набирать десятки тысяч об/мин (в то время как асинхронные без частотного привода ограничены 3000 об/мин, даже чуть меньше, 2950 условно говоря), но с крупными двигателями лучше так не шутить... Самыми оборотистыми когда-то считались синхронные реактивные машины, где и обмотки ротора никакой нет, только железные пластины своеобразной формы, или даже ротор, сделанный из цельного куска железа. И применялись они в очень специфических ситуациях...
Сравним наших "героев". У двигателя электрички номинальная мощность приведена для 780 об/мин (см. спецификацию), хотя "наибольшая эксплуатационная частота вращения": 2065 об/мин, это соответствует конструкционной скорости 135 км/ч. Значит, номинальная мощность приведена для 50 км/ч. Но там же мы видим: возбуждение 50%. То есть, при возбуждении 100%, та же самая мощность будет достигнута уже на 390 об/мин!
А у "Теслы" максимальная мощность достигается при 5870 об/мин, что соответствует скорости 80 км/ч. Разница по оборотам аккурат в 15 раз! Ровно такая разница в удельной мощности двигателей, вот и нашли её причину. То есть, магнитное поле примерно одинаковое (сильно не повысишь), плотность тока примерно одинаковая, и маленький моторчик "Теслы" принципиально не мог бы выдать запредельный крутящий момент, но он добрал своё оборотами. Далось это "тяжело": потери в железе при "полном поле" (т.е при попытке получить максимальный крутящий момент) велики, и только водяное охлаждение спасает, да и то ненадолго... Высокий КПД этот двигатель даёт только на сильно пониженной мощности, на которой он и применяется обычно, и это даже самые преданные фанаты могут подтвердить. Уж или заявленный пробег и эффективность, на скорости 50 км/ч без резких манёвров, или рекордный разгон, но далеко с ним не уедешь, очень много энергии уйдёт в тепло обмоток и железа.
А может всё-таки поставим двигатель "Теслы" на электричку?
Да, физику он не обманул. Плотность тока "старая", магнитное поле "старое", своё он взял за счёт "правильного" указания мощности, как когда-то китайские музыкальные центры указывали так называемый PMPO (Peak Musical Power Output), и за счёт бешеных оборотов.
Но всё же. Заменить 2-тонный мотор на 100-килограммовый, сразу электричка "полегчает", а меньше массы за собой тянуть - значит меньше электричества потратит, хорошо же?
Что-то не уверен... Сейчас в электричке самый минимум движущихся частей: редуктор одноступенчатый. Большая шестерня посажена на колёсную пару, малая шестерня через эластичную муфту соединена с двигателем. Проще уже не получалось: если двигатель посадить непосредственно на колёсную пару, будет огромная неподрессоренная масса, которая на больших скоростях повредит пути. В своё время, в начале XX века, придумывали тяговые двигатели, у которых статор закреплён на тележке, а ротор - на колёсной паре и может довольно далеко гулять туда-сюда, то есть был создан огромный воздушный зазор! Идея казалась неплохой, но "не взлетела" - слишком уж паршивым получался такой двигатель.
Так что от одноступенчатого редуктора никуда не денешься... У электрички редукция составляет примерно 1:3. Если туда установить взамен двигатель "Теслы", понадобится редукция 1:26. В самой "Тесле" установлен 4-ступенчатый редуктор 1:9,73, ведь диаметр колёс "Теслы" меньше, чем колёс электрички, и предельная скорость 250 км/ч, но нам нужна меньшая скорость и огромная тяга! Выходит, здесь нужна ещё одна ступень. И возникает вопрос, сможет ли этот редуктор проработать 3 млн. км? Даже на самой "Тесле" - нет, при том, что его непрерывная работа на предельной мощности вовсе не планируется! Если человек ежедневно по много раз разгоняется до 250 км/ч, то весьма вероятно, что в течение месяца он убьётся, и гарантия автоматически снимется. А при нормальной езде редуктор работает в сильно облегчённом режиме, ведь на самом деле для легкового автомобиля и стандартные 70..100 л.с (50..70 кВт) - вполне достаточно. Редко кто втапливает педаль газа до упора, до выхода на "красные" обороты, всегда учат более плавной, щадящей езде, поскольку она хороша и для расхода, и для долговечности, и в целом для безопасности дорожного движения. На поддержание скорости 100 км/ч легковым автомобилем тратится около 14 кВт. Но вот на электричке - извините, редуктор будет пахать "на 100%", потому как ровно так обычно и происходит разгон - на мощности 1 МВт на каждый моторный вагон.
Но одного лишь 5-ступенчатого редуктора и двигателя недостаточно - ещё необходимо будет устанавливать жидкостную систему охлаждения: трубки, насос, радиатор, мощный вентилятор. Двигатель необходимо будет умощнить со 160 кВт (в течение 12 минут) до 250 кВт (в течение часа), так что о его исходной массе придётся позабыть. И после всего этого он будет жрать больше, чем "нормальный" двигатель электрички! Это совершенно нормальное явление для суперкара - жрать "не в себя" при демонстрации своей разгонной динамики. Но для электрички это нормальный ежедневный режим, стартовать со станции на полной мощности. У электрички в этом основном режиме КПД составляет 90,5%. Масса двигателей составляет 8% от массы состава. Поэтому, если выбирать между существующими 2-тонными движками и гипотетическим ДВИЖКОМ С НУЛЕВОЙ МАССОЙ, но КПД 80%, то, как ни странно, мы выберем существующий 2-тонный, с ним суммарный расход электроэнергии окажется тупо ниже! А прийти при 5-ступенчатом редукторе и бешеных оборотах к КПД в те же 90% довольно-таки трудно...
Не забываем и про выбег. Это автомобили почти никогда не ездят "по инерции" - не позволяет ни трение качения резиновых колёс по асфальту, ни лобовое сопротивление, которое, отнесённое к массе в 1-2 тонны, весьма велико. А поезда проводят "на выбеге" львиную долю времени! И очень неплохо, чтобы при этом сопротивление движению было минимально возможным. 5-ступенчатый редуктор, и вал двигателя, крутящегося на 19 000 об/мин (при 135 км/ч) в таком случае не лучшее решение... Даже малейшая остаточная намагниченность в роторе и статоре понаделает дел, не говоря о других потерях.
В общем, игра не стоит свеч. Если взглянуть на тяговые двигатели на железных дорогах разных стран, мы увидим, что такого не делал никто. Да, в целом идёт тенденция на повышение оборотов тяговых двигателей, но не так радикально. Например, у "Ласточки" (Siemens Desiro) стоят 6-полюсные асинхронные двигатели, которые при максимальной скорости в 160 км/ч дают 4300 об/мин. Для этого используется двухступенчатый редуктор 1:4,85, и надо полагать, что немецкие инженеры (в отличие от всем известной ливерной колбасы) не зря едят свой хлеб и всё грамотно рассчитали.
Так где революция?
Подвижки, определённо, есть. В первую очередь, переход в электротранспорте на асинхронные электродвигатели. Он стал возможным благодаря развитию силовой электроники, т.е преобразователей напряжения, тяговых инверторов. Попытки предпринимались давно, в том числе и в СССР, но ещё в 80-90-е годы элементная база была недостаточно совершенной: тяговые инверторы сделать получалось, но конструкция получалась более громоздкой, чем старый добрый коллекторный двигатель с реостатной системой пуска, и более капризной. Экономию энергии и более плавный ход она давала, но в целом переход оказывался нерентабельным.
Сейчас смысл уже есть, но не нужно здесь искать улучшения "в разы", их не будет. Экономия в лучшем случае процентов 20, расточительность реостатного пуска сильно преувеличена: за счёт переподключения двигателей из последовательного в параллельное соединение, использования ослабления возбуждения вплоть до 16%, реостаты оказываются нужны только на начальном этапе разгона. Последний вагон электрички покинул платформу - реостаты уже выведены! Но ещё из плюсов нового привода - гораздо меньше обслуживания асинхронных двигателей, в отличие от коллекторных, в которых нужно регулярно следить за состоянием щёточного узла, достаточно часто заменять щётки, время от времени чистить и протачивать коллектор и так далее.
Хотелось бы полностью освоить эту тематику в России, но и заламывать руки, кричать, "как мы безнадёжно отстали" не стоит. При необходимости можно и на коллекторных поездить.
Появились интересные разновидности двигателей, которые раньше если и существовали "на бумаге", то упирались в сложности в запуске и регулировании, находили себе очень специфические ниши, а сейчас, при наличии тягового привода, можно из них получить "всё что нужно". Это и синхронные реактивные двигатели, в роторе которых нет ни обмоток, ни магнитов - просто электротехническая сталь, вырезанная интересным образом. Хороши своей простотой, эффективностью (ротор НЕ ГРЕЕТСЯ), дешевизной (и цветмета меньше, а редкоземельных магнитов и вовсе нет!), но особенно компактными их не назовёшь.
Другая разновидность - синхронные двигатели с "запрятанными" постоянными магнитами. Их преимущество в том, что при векторном управлении можно включить "ослабление поля", тем самым повысив диапазон регулирования. В обычных двигателях с постоянными магнитами ослабление невозможно, поэтому приходится менять напряжение в широких пределах. Скажем, для получения максимальной скорости нам нужно 48 вольт, тогда при четверти скорости нужно 12 вольт, и никак иначе. Хочешь при этом огромную тягу - подавай большой ток. Если нам, к примеру, нужна мощность 480 Вт как на больших, так и на малых оборотах, вплоть до 1/8 от максимальной скорости, нам придётся устроить источник питания на 0..48 вольт с током до 80 ампер... Удобнее было бы всегда подавать полное напряжение, а уже ток менялся бы в зависимости от необходимой мощности, до 10 ампер в этом примере. В старых добрых коллекторных двигателях это достигалось с помощью обмотки возбуждения, в асинхронных, в какой-то мере - изменением частоты (повысил частоту при том же напряжении - снизилось магнитное поле - разгон продолжается, хоть и не очень быстрый), а вот с постоянными магнитами такой фокус не проходил. И сейчас не сказать, что очень хорошо проходит, коллекторник или синхронный двигатель с обмотками ротора дадут огромную фору, но уже хоть что-то.
Насколько они "зайдут" - пока сложно судить.
Выводы
1. Новые "рекордные" двигатели появились ровно потому, что для них возникла ниша. В "старых" применениях они не нужны. Двигатели электромобилей неплохо смотрятся в электромобилях (скорее даже в "суперкарах", задача которых пафосно рвать с места), но их не поставишь в электричку или троллейбус. Авиамодельные движки сгорят, если перед ними не будет пропеллера, продувающего через них прорву воздуха, и так далее. "Рекордность" характеристик достигается в первую очередь высокими оборотами и запредельными токами. Известных ограничений на магнитное поле и на плотность тока они, разумеется, не нарушают.
2. Поскольку прогресс в электротехнических сталях, а тем более, в проводниках электричества сейчас отсутствует, то РЕВОЛЮЦИОННЫХ изменений ждать не стоит, есть лимит на создаваемую двигателем тягу, да и поднятие оборотов очень быстро приводит к осложнениям. Разве что революцией станет доведённый до промышленной эксплуатации двигатель на сверхпроводимости, но и в его массовом применении есть большие сомнения.
3. Это не говорит о полном отсутствии прогресса в двигателях - он продолжается и связан, в первую очередь, с развитием силовой электроники, конкретнее, тяговых приводов, в том числе с векторным управлением. При наличии (и удешевлении) таких приводов становятся обоснованными ранее забытые разновидности двигателей, которые могут потеснить сегодняшних "лидеров", но учитывая весьма незначительные улучшения, это может затянуться надолго...
Комментарии
Спасибо! Очень интересно и познавательно.
Супер ! Спасибо. Теперь понятно, что гения в этих повозках нет. Вернее, гениев выкинули на помойку. Остался продаван.
Гении тоже есть, только ж физику не обманешь.
Это компьютеры могут продолжать активно развиваться, так как до реальных пределов, даже сегодня, как пешком до луны.
А всякие парогенераторы и электродвители если процентов на 10-15 лучше того, что было полвека назад — так это очень круто.
Но общество, видящее что происходит с компьютерами, требует такого же прогресса везде, вот и приходится лапшу на уши набрасывать.
физику надо знать и уметь ей комбинировать
для непосвященных в физику эти комбинации выглядят как чудеса
Указанные "реальные пределы" являются чисто теоретическими.
По факту компьютеры уже упёрлись в физический предел. Каждая следующая итерация прироста производительности/уменьшения габаритов даётся очень высокой ценой. Уже при проектировании шин данных учитываются ограничения по скорости света.
Как вас сказать, чтобы не обидеть.
Первый компьютер, при проектировании которого её приходилось учитывать — это Cray-1 c производительностью 133 мегафлопса.
Да, но современные процессоры уже терафлопс перешагнули и даже процессор в вашем телефоне быстрее этой самой кушетки с подогревом.
Так что до пределов всё ещё, даже сегодня, ещё очень и очень далеко.
Это вам не турбины какие-нибудь, где выжать лишний процент это достижение, а десять процентов это разница между лидером и самым отстоем, какой вообще бывает.
Закон Мура пошёл по одному месту. Банальное уменьшение размеров транзисторов уже не помогает. Приходится менять их конструкцию и искать другие материалы. Нанометры указанные в названии техпроцесса - чисто маркетинговая фича и к реальному размеру затвора транзисторов имеет опосредованное отношение.
Стоимость оборудования для производства процессоров по самым последним техпроцессам такая низкая, что производителей процессоров нынче пруд пруди, в каждой подворотне делают. Не то что в упомянутых Вами 80-х. Когда производителей было чуть больше десятка.
Последнее было иронией, если Вы не поняли.
Вспомните разницу между компьютером 92-го и 2002-го года. И "развитие", по большей части имитационно-маркетинговое, с 2012-го по 2022-й.
Спасибо, информация может пригодиться!
Осилил половину, позже попробую дойти до конца
Получил большое удовольствие от прочтения. Спасибо.
Присоединяюсь!
А в аккумуляторах тоже прорыва не ждать?
Везде, где мы близки к физическим пределам одна и та же картина: 1-2% улучшений в год.
“Нарастающим итогом” иногда удаётся получить 2-3 кратное улучшение, только не за пару лет, как с компьютерами, а лет за сто.
Будет прорыв (и не один) при смене типа аккумуляторов. Осталось дождаться, когда изобретут и начнут производить крупные партии аккумуляторов новых типов.
А что можете сказать по двигателю Дуюнова?
Уже сам факт прикручивания к двигателю фамилии и наличие интернет-секты поклонников говорит что ничего там нет, кроме самой секты и её гуру.
Слушал видео от Дуюнова, и всегда они вызывали впечатление "маркетолог покусал инженера". Дядька явно в теме, обмотка такая имеет право на существование, с некоторыми оговорками, но ему сказали: ни в коем случае не говори об улучшении на 4%, на этом бизнес не поднимешь!!! Обещай разы и порядки!!!
Первая ассоциация на "Славянку" у меня - выпрямительная установка в метро, дающая 825 вольт на контактный рельс. Там две вторичных обмотки трансформатора (на входе 10 кВ из города), одна звездой, затем диодный мостик. Вторая треугольником - и к нему диодный мостик. Затем они соединены последовательно, и получается постоянный ток с очень малыми пульсациями, ибо звезда отн треугольника сдвинуты на 60 градусов, т.е своего рода "шестифазный" ток получили.
Думаю, для конкретной задачи, сделать двигатель для "частотника", обмотка "Славянка" может иметь смысл, она всё наоборот проведёт в некотором смысле - грязные входные импульсы преобразует в сколько-нибудь чистое вращающееся поле.
Сказал бы как есть, начистоту - цены бы ему не было.
А в натягивании совы на глобус у них начинаются чудеса. Показали моторчик, сказали, сейчас перемотаем на Славянку, и он станет мощнее "на один габарит". Начали его проверять на повышенной мощности, температуры замерили, постановили: ВСЁ ХОРОШО, ПОБЕДА! Вот только они бы ещё в исходной конфигурации этот движок потестили бы, там же какой-никакой запас делается, чтоб движок и на 242 вольтах не сгорел, и на 198 (когда токи повышаются при той же мощности), а уж 220 ему комфортно, скорее всего вынес бы эту мощность, ну пускай чуть горячее...
А когда они тот же движок от частотника запускают на многократно большие обороты и восклицают, смотрите, славянка подняла мощность в 3 раза, это совсем грустно...
Спасибо
По сути всё уже сказано выше: мощность - сила*расстояние/время, сила пропорционально току и полю, а ток и поле ограничены удельным сопротивлением и нагревом.
Каким образом обмотки не тасуй, как их ни крути, один фиг, сила Ампера - ток на поле.
...
Частным образом замечу, что обмотки Дуюнова могли бы иметь некий смысл в некоторых случаях пол-века назад, потому что это асинхронный двигатель без дополнительного управления - втыкай в три фазы и всё, работает. Свои преимущества, свои недостатки для разных режимов, так что могли бы найтись режимы и применения, где можно выгодно перемотать имеющийся двигатель вместо разработки нового под это применение. Я не могу придумать таких применений, но не могу и честно сказать, что это на 100% чистая афёра.
Но, блин. 21-й век на дворе! Почти во всех применениях сейчас векторный контроль, и не только у асинхронных двигателей. Эти товарищи пихают его для машин и велосипедов, где инвертор и компутерное управление фазами есть чуть ли не по определению, там же питание от батареек! Не, судари, это просто откровенная уже дурь. Что можно выиграть, намотав обмотки чуть иначе? Да нифига нельзя. Правда, сильно хуже тоже не будет, но лучше-то - тоже! И вот в чём смысл вот всей этой вот движухи тогда?
Параметры асинхронного двигла с короткозамкнутой обмоткой почти полностью определяются статором и его полем. Ротор можно просто медной болванкой делать (и делают иногда!), характеристики не сильно и хуже будут.
Спасибо за разъяснения про электродвижение. Я подозревал, что с "электричками" что-то не так, но теперь стал больше в этом понимать.
В закладки положил, по диагонали не идёт))
Спасибо!
Спасибо за статью.
Познавательно. И понятно становится, почему Илон наш Маск отказался от электрогрузовика.
"Быстро, надёжно, дёшево" - выберете два показателя. Работает практически всегда и везде.
Что значит "отказался"?
Давеча выкатил новый образ оного и пообещал "вот-вот прям завтра, на крайняк послезавтра" начать выпуск.
Да чтобы Маск перестал окормлять завтраками о новых супер-гипер-повозках?
отлично работает широтно -импульсная модуляция
не совсем. ниже определённых длительностей и соответственно выше определённых частот будет тепло и больше ничего. BAM модуляция для чего?
прочтите текст комментария полностью, включая цитату
Bit Angle modulation, https://www.christian-marty.ch/ElectricThings/BitAngleModulation.html
Немного помогает растянуть импульсы по слоту, энергетически аналогично, меньше насыщение сердечников.
Работает, но не столь отлично. Нужно, грубо говоря, из 48 вольт 10 ампер получать 6 вольт 80 ампер. Ключи нужны 80-амперные, источник тока 80-амперный (или нехилый входной фильтр), и неплохо бы 80-амперный дроссель, чтобы на двигатель уже пошло подобие постоянного тока.
А когда ключ из закрытого состояния с напряжением 48 вольт переходит в открытое с 80 амперами, есть такой нехороший момент, когда всё посерединке, 24 вольта, 40 ампер, и всё это в тепло, 1 кВт в импульсе. Поэтому ключи нужны быстродействующие, иначе много потеряем в переходных процессах.
Реализуемо - да. Но довольно-таки громоздко и дорого. Если двигатель позволит делать подобное "внутри себя", регулируя магнитное поле, будет лучше.
в смысле, у вас скорость уменьшилась, а энергопотребление вы хотите оставить прежним?
48*10=6*80? В подавляющей части транспортных задач уменьшение скорости приводит к уменьшению энергопотребления, поэтому никаки 80 ампер не будет.
ШИМ массово используется для малого электротранспорта, который претерпевает сейчас бешенный рост. Контроллер занимает незначительную часть общего объема и примерно 1/10 от суммарной стоимости связки мотор + батарея. Называть это громоздко и дорого очень странно.
В малом электротранспорте любят одну и ту же тягу от нуля до максимума с резким "обрывом" по достижении питающего напряжения. В итоге пишут: 300 Вт, 500 Вт, а то и 1 кВт (прямой привод велика), но почему-то я на обычном велике, не будучи мегаспортсменом, с места их "уделываю", при том что считается что хороший велосипедист около 180 Вт развивает. Т.е да, когда они до 40 км/ч разгонятся, их никто не догонит, но это ж когда будет...
А тяговая характеристика "постоянной мощности" очень распространена в технике покрупнее: на малых скоростях ограничение по сцеплению с дорогой, затем ограничение по мощности, и только потом, на высоких скоростях - по напряжению. И вот там постоянные магниты долго не приживались из-за озвученной мной проблемы.
Одну и ту же тягу от нуля обеспечивает паровая машина. Конечно, с определённого числа оборотов, момент падает, но всё равно очень хорошо.
В паровых машинах своя хитрость есть в том, чтобы получить высокую мощность и на старте, и на высоких скоростях: регулирование отсечки пара! На старте пар в цилиндр поступает "до последнего" - в итоге тяга огромная, но и расход пара - тоже. А на высокой скорости пар "впрыскивают" в начале расширения - и позволяют ему расшириться по адиабате. К концу расширения давление уже не то, но для движения с постоянной скоростью хватает!
Самое смешное, этот принцип совершенно случайно вроде как обнаружили, была ручка реверсор, чтобы задом поехать, а оказалось, что если её выставить не до упора, то ход очень экономичный! Потом под это уже теорию подвели.
Вот тягу на малых скоростях, хотелось бы побольше. Эх... Это я пользователь лёгкого есамика мечтаю.
Работает, но не отлично.
Попробуйте взять эпюру напряжения для ШИМ-сигнала и разложить её по Фурье. О, появились высокочастотные гармоники? Ну вот, эта высокочастотная компонента - ненужные вихревые токи и потери, как минимум.
Идеальный сигнал на обмотках (для данного двигателя и его материалов) - гармонический, на оптимальной для двигателя частоте.
Да ВЧ гармоники есть. В достатоной степени лечатся фильтрами. Еще раз учтоняю, топикстартер указал, что управление скоростью осущетсвляется напряжением, и никак иначе. Я указал, что в технике массово используется и другой метод управления скоростью, а именно ШИМ.
ШИМ - это по сути и есть регулирование напряжения, разве что двигатель сам становится частью выходного фильтра.
Точно! ШИМ-регулятор это замена реостату, не более того.
Регулятор почти без выделения тепла :)
Спасибо! Очень интересно.
говорят, комбинация обмоток звезда-треугольник даёт неимоверную эффективность э.д. ну и когда без щёток.
Двигатель Дуюнова?
да, там легенды про электрозапорожец были...
В сравнении с коллектором - да. :)
В сравнени со звездой или треугольником - нет.
автору в коллекцию https://bbs.homeshopmachinist.net/forum/general/66544-the-big-machine-giant-homopolar-generator-for-au-physics-research (эта прада, использовалась как генератор. но ток в такой машине может быть миллионы ампер)
спасибо, можно положить в факи, для свидетелей святого маска и прочих ушибленных пиаром.
Спасибо. Статья очень полезная.
И всё это надо запихать в жидкий азот. А ещё лучше - в жидкий гелий!
Либо просто напрямую охлаждать компресоорами кторые сжижают это гелий. Так в некоторых МРТ установках планируют делать.
а сейчас Дуюнов моторс, и 269 стран его поддерживает. Россия вперёд, конечно.
Страницы